Контроллер SDRAM для Марсохода
Уважаемые друзья! Мы потратили много времени в поисках подходящиего контроллера для нашей SoC и в результате решили реализовать его самостоятельно, взяв за основу спецификацию на микросхему MT48LC4M16A2-75 компании Micron. Вот какое устройство у нас получилось:
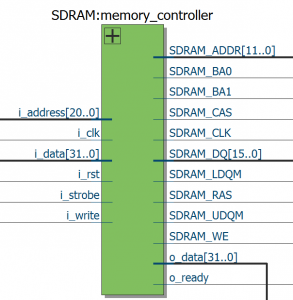
Мы реализовали 32-х битную шину данных (i_data — используется для записи данных в память, o_data — для чтения данных из памяти). Выход o_ready сигнализирует о готовности выполнения предыдущей операции и готовности принять новую команду.
Вход i_strobe сигнализирует о передаче команды контроллеру — в случае, если совместно с сигналом i_strobe подан сигнал i_write, производится запись в память данных с входный шины i_data по адресу, заданному значением на шине i_address.
Если в момент сигнала i_strobe сигнал i_write не активен, то происходит чтение данных по адресу, заданному значением на шине i_address. Считанные данные будут доступны на шине o_data при устрановке сигнала o_ready.
Сигнал i_rst используется для сброса и инициализации контроллера и микросхемы SDRAM.
Сигнал i_clk используется для тактирования контроллера и микросхемы SDRAM.
Выводы, название которых начинается со строки SDRAM_, должны быть назначены на ножки ПЛИС, подключенные к микросхеме SDRAM на плате Марсоход.
Теперь немного о временных характеристиках. Возможны три варианта задержки после поступления команды записи или чтения.
- Минимальная задержка записи/чтения 32-х разрядоного слова достигается при операциях в пределах одной строки — операция занимает 4 такта.
- Задержка в ситуации, когда в процессе доступа изменяется строка -в этом случае операция потребует 8 тактов для записи или чтения 32-х битного слова.
- Худшим случаем задержки является вариант, при котором текущая операция откадывается до завершения «рефреша» памяти и максимальное время задержки доступа к памяти может составить до 16 тактов.
Ниже показано количество занимаемых контроллером ресурсов ПЛИС.

Фрагмент отчёта «Resource Utilization by Entity»
Схематика нашего контроллера распространяется при условии одновременного выполнения двух лицензий — Xameleon Green и Xameleon Yellow. Ознакомтесь с ними перед использованием нашего решения.
Если вы принимаете условия этих лицензий, то скачать исходный код SDRAM контроллера можно по следующей ссылке:
Скачать исходный код SDRAM контроллера для платы Марсоход
Обращаем ваше внимание на то, что мы не несём никакой ответственности за любые последствия, вызванные использованием нашего контроллера. Также мы:
- не утверждаем что контроллер не содержит ошибок;
- не утверждаем что максимально оптимально использовали возможности SDRAM;
- открыты для общения и с радостью выслушаем замечания, багрепорты и предложения по улучшению контроллера.
Размещённая на этой странице информация может быть изменена или удалена без предварительного уведомления.
Оставить комментарий